TBS Discovery


The Team BlackSheep (TBS) Discovery is a purpose made FPV platform based on the DJI Flame Wheel F450 frame base.
It has a asymmetric structure to offer a propeller free view, incorporates traces on the frame plates to minimize wiring, has space for both a flight camera and HD recording camera (GoPro) in the front and a protective cage for a high capacity LiPo battery in the back. There is also an on-board current sensor which is connected to an optional TBS CORE video controller.
Specifications
- Released:
- DJI Flame Wheel: November 2011
- TBS Discovery: June 2012
- Type: Spider quadrotor
- Airframe: Carbon fiber reinforced
- Diameter: 450 mm - Flame Wheel, Discovery is a bit wider
- Height: 103 mm
- Weight [1]:
- Frame only: 192 grams
- Frame with CORE: 198 grams
- Frame with arms: 414 grams
- Takeoff weight: 800 grams to 1600 grams
- Battery: 3S-4S 3000-4000mAh LiPo
- Battery cage: W55xH37xL173 mm - extreme dimensions, aim for 5-10 mm less
- Outer motor dimensions: Ø28x26 mm, Ø28x30 mm, Ø32x28 mm, Ø35x28 mm, Ø35x36 mm
- Propellers: 9x5-inch or 10x5-inch
- ESC: 4x 18-30A switched
- Forward speed: ~60 km/h / ~40 miles/h
- Flight time: 12-15 minutes
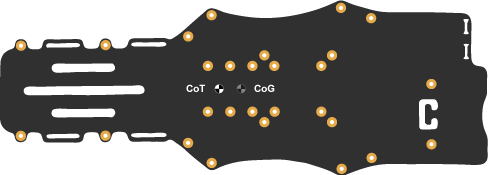
- Center of gravity: marked on bottom frame, aim for center of thrust 15 mm forward [2] [3] [4]
- Behaviors like: T-Rex 450 without 3D capability [5]
- Recommended flying area: 25x25 meters
- Clone models: HJ450, RM450 and Q450 [6]
- Product pages:
- DJI Hobby - Flame Wheel kits and NAZA flight controller
- Team BlackSheep - TBS Discovery - FPV focused frame

Frame kit
The quad is build using separate base plates and frame arms. In other words, it is a purpose built kit using the DJI Flame Wheel arms for structural support and TBS Discovery plates for the central core and electronics installation.
- 1x DJI F450 Motor+Propellers+ESC+NAZA kit - from Flying-Hobby
- Alternatively:
- 2x DJI F450 Flame Wheel black arm - from Flying-Hobby
- 2x DJI F450 Flame Wheel white arm - from Flying-Hobby
- 1x TBS Discovery top and bottom plate including screws and damping tape - from TBS
- 1x TBS CORE video power distribution and OSD system - from TBS
- 1x TBS 100A current sensor - from TBS
- 1x TBS RF Tin Shield for TBS CORE - from TBS
Manual
- TBS Discovery electronics installation - all the wiring shown in a stylized way
- TBS CORE manual rev may - power distribution for the video system
- DJI F450 Flame Wheel user manual v1.6 - basic setup instructions for the Flame Wheel
- DJI NAZA Assistant user manual v1.4 - configure the flight controller
- DJI NAZA Assistant user manual v2.1 - configure the flight controller
- DJI NAZA Assistant user manual v2.2 - configure the flight controller
- WKM Detailed Descriptions on Autopilot parameter setting - guide for setting up NAZA autopilot
- OpenPilot Stabilization Configuration - useful fundamentals of PID control loops
- OpenPilot Stabilization Tuning for Multirotor - some practical tuning tips
My setup
- F450 Flame Wheel setup - basic setup of the DJI F450 Flame Wheel
- TBS Discovery setup - list of my settings and configurations for the TBS Discovery
Base setup
This is the basis for the quad and makes for a perfect platform to start testing equipment.
- Motors: DJI 2212 920KV 144W brushless motor
- ESCs: DJI OPTO 30A no-BEC brushless speed controller
- Propellers: Graupner E-Prop 10x5 inch propeller set [7]
- Flight Controller: DJI NAZA no-GPS flight controller
- Transmitter: Spektrum DX7 radio with FrSky DHT 2.4 GHz 60mW transmitter
- Receiver: FrSky D6FR 2.4 GHz 6-channel two-way receiver
- Battery: Turnigy nano-tech 3300mah 35-70C 4SP1 14.8V Lithium-ion Polymer 346.5 grams battery - really only need 25C
Upgraded setup
- Motors: RCTimer A2830-14 750KV 185W outrunner motor [11]
- ESCs: Hobby King F-30A Brushless Programmable ESC with bare leads - reprogrammed with RapidESC firmware
- Alternatively: RCTimer 30A Brushless Programmable ESC with bare leads, internal oscillator (not optimal) - reprogrammed with RapidESC firmware
- Alternatively: RCTimer SK-30A SimonK Firmware multicopter speed controller
- Transmitter: ImmersionRC EzUHF 433 MHz 200mW/600mW transmitter - long range
- Receiver: ImmersionRC EzUHF 8-channel 433 MHz diversity receiver with Sander Style dipole UHF antennas - long range
- Alternatively: FrSky D4R-II 4-channel 2.4Ghz 8ch-CPPM RSSI two-way receiver - light and small
- Flight Controller: OpenPilot CopterControl flight control - limited availability
- Battery: Zippy Compact 4000mAh 4S 25C Lipo Pack - same size and dimensions as Nano-tech 3300 mAh [12]
FPV setup
- FPV camera: Security Camera 2000 PZ0420 600TVL camera
- HD camera: GoPro HD Hero 1 with SanDisk 8 GB SD-card
- Dampening: Align K10457A PU Adhesive Gel
- Video transmitter: Best Offer Buy BOB ESXF700mW SR-700MW 1.2GHz 700mW 12V blue/purple transmitter
- Microphone: Etech ETMIC 5V FPV Mini Mic
- Antenna: Tuned RG316 single dipole antenna
- Antenna: Cloverleaf 3 lobe circular polarized omnidirectional antenna
- Video receiver: Best Offer Buy Comtech module 12V receiver
- Antenna: Skew-Planar Wheel 4 lobe circular polarized omnidirectional antenna
- Goggles: FatShark Dominator FPV goggles
- Display: MacBook Air with EasyCAP DC60 USB video capture adapter
- Other: OEM 3S 2200mAh ground station batteries, custom made power cables, composite video splitter, Sparkfun PRT-10374 Jumper Wire 4-pin 12-inch
Common setups
This is a list of verified setup from people who has built their Disco. To use Graupner props on motors with 5 mm shafts (Tiger), use a 8-to-5 mm reducers, getfpv.com.
- RCTimer A2830-14 750KV 185W outrunner motor with prop adapter - replacement bearings available [13]
- Tiger Motors MT2216-11 210W brushless motor [17]
- Note: Same as the TBS 900KV motors, just rebranded
- Tiger Motors MT-2216-10 900KV 210W brushless motor [18] [19]
- NTM 28-30A 750KV 140W prop drive series motor
- NTM 28-26A 1200KV 250W prop drive series motor
- Note: Some reports of problems with SimonK ESCs [25] [26] [27] WiiESC fix
- Suggested setup: APC 8x3.8 propellers, Turnigy Plush 30A ESC, Nano-tech 4S 3300mAh, OpenPilot CC [28]
- Suggested setup: APC 10x4.5 propellers, Hobby King F-30A 30A ESC SimonK flashed [29]
- Suggested setup: APC 10x4.75 propellers, Hobby King F-30A 30A ESC SimonK flashed, 4S battery [30]
- DJI 2212 920KV 144W brushless motor [31] - similar/rebrand of EMAX 2212-3S 920KV [32]
- Suppo 2810/12 1000KV 225W brushless motor
- Suggested setup: Graupner E-Prop 10x5 set, DJI OPTO 30A ESCs, DJI NAZA controller [35]
- Suppo 2814/8 1000KV 380W brushless motor
- Suggested setup: Graupner E-Prop 9x5 set, DJI OPTO 30A ESCs, 4S 3000mAh+1800mAh, DJI NAZA controller [36]
- Tiger MT-4006-13 740KV motor - no punch, vibration free
- Graupner Compact 300 740KV 9.6V - expensive
- Suggested setup: Graupner ESC 18-SC, DJI NAZA controller, Nano-tech 4S 3300mAh [40]
- SunnySky Angel A2212 2212-980KV 180W brushless motor
- Suggested setup: Graupner 9x5 propellers, 4S 3300mAh, OpenPilot CopterControl [41]
- BP Hobbies A2217-9 950KV 200W brushless outrunner motor
- Suggested setup: 10-inch propellers, Aeroquad controller, TowerPro 18A ESC, 4S 5000mAh [42]
Potential other candidates:
- TorxPower MC2216 Pro 900KV 210W brushless motor [43]
- NTM 28-26 1350KV 310W prop drive series motor [44]
- NX-4008 620KV Brushless quadcopter motor [45] [46]
- Note: Some reports of problems with SimonK ESCs [47]
- FM-4008 620KV Brushless quadcopter motor [48]
- Avroto M2814-11S Short Shaft 770KV 350W Brushless motor [49]
- Tiger T-Motor MT2216-12 800KV 180W brushless motor [50]
- Tiger T-Motor MS2212 980KV 165W brussless motor [51]
Accessories
- Align K10457A PU Adhesive Gel - less GoPro vibrations
- USBasp AVR Programming Device for Atmel based ESC controllers - Hobby King
- 3M Double-sided tape pack - Hobby King
- Maplin Robust high impact large travel case [52]
- Bolton Tools Watertight Pelican Style Hard Camera Case 20.5" X 17" X 9" [53]
- DJI F450 Motor Extension Plates [54] [55]
- Waterbuoy Intelligent miniature floatation device [56]
Tips and tricks
- To get rid of vibrationse/jello, use only good quality propellers, e.g. Graupner and APC [57] [58]
- For longer flight times, use low Kv motors and large propellers but watch the power usage
- To avoid propellers in the GoPro view, use Wide setting for 8-inch propellers and Medium for 10-inch propellers
- A 25A ESC is more than enough for this frame, max. 60A full throttle for all four controllers equals 15A per ESC, 10A margin [59]
- To a clean ESC install, solder the 3.5 mm socket motor connectors directly on the controller board [60]
- The standard DJI motor and propellers use a 8 mm shaft/bell, APC props are 6 mm and has to be adjusted, Graupner is 8 mm [61]
- Program the ESCs to be set up with Break off, Battery type NiMh (to turn off LiPo voltage cut-off), Cut-off type: soft cut, Cut-off voltage low, Aircraft type airplane, Start mode normal, Timing/response mode high (400 Hz), Governor off and everything else off [62] [63]
- Calibrate the throttle range for each ESC individually by setting the throttle stick high on power on and then low until a confirmation beep is heard
- Consider upgrading the ESC firmware to SimonK version get the full refresh rate needed for multirotors, RapidESC database shows all capable controllers
- Propeller thrust is only the amount a motor can carry/load, not at which speed, so therefore thrust determines the acceleration, kV determines the speed range [64]
- Only connect one BEC 5V power supply from a single ESC, disconnect the red power lead from the other three ESCs [65]
- On the flight controller, set Kp (instantaneously proportional error correction) to a high value to make the quad responsive and decrease 20% when it oscillates/nags, set Ki (integral/sum errors over time) to a high value to make it steady in windy, improper center of gravity, fast forward or long dives/turns, situations where the quad is off level for a fairly long period, decrease 20% when long slow oscillations occur [66]
- Since the front two arms are asymmetrical, increase pitch Kp and Ki with 1/3 of the value for roll (for OpenPilot) [67]
- On the receiver, set up fail-safe on signal loss so that throttle is above 10% and that NAZA flight mode is put to 70% or so the NAZA will go into fail-safe mode, and the rest of the sticks center, on failure the quadcopter will land smoothly by itself, one less unexpected fall from the sky to worry about [68]
- In a dive the back-end of the Discovery might not fall as quick as the front, a way to counter this might be to set Ki for pitch (OpenPilot) to higher value to correct for the lack of power to the front motors [69]
- The results on eCalc might show "over power", but since this is a multirotor the load is shared and only in bust/acceleration moments will the motors be taxed [70]
- If the motors stall, try to increase the battery voltage, e.g. go from 3S to 4S batteries to increase/up the torque of the motors [71]
- Balance the motor by attaching a zip-tie spinning the motor up, stop and move the zip-tie and try again, the point of least vibration is the point where centre of rotation and mass is close to zero [72]
- Change the throttle curve, either in OpenPilot (preferably) or on the radio, to be flat in the middle to reduce the change in throttle versus the stick movement, this should smooth your throttle response and allow for easy altitude adjustment - see pic [73]
- Reduce the top throttle point (dual rate) to 90% to make sure the flight controller still can take over control when throttle stick is at full
- In DJI NAZA Assistant setup, start off using basic rate gain 150/155/120/100 and for attitude gain 125/125, then adjust as needed [74] [75]
- To make the movement of the sticks less sensitive around the center, in attitude mode add 30% expo for elevator and aileron, 10% for rudder in the radio programming, in rate mode use 50% for elevator and aileron, 20% for rudder [76] [77]
- Center of Gravity (CG, CoG) is for balance, distributing the weight equally over each motor, bind two pieces of strings to create an X, this is the CG spot [78] [79]
- The flight controller does not need to be over the CG spot, on the TBS Discovery it should be mounted in the center of the two sets of four holes on the bottom plate [80] [81]
- Mount the flight controller on the CG spot, or alternatively anywhere on the frame and compensate the offset from CG in the software configuration (NAZA Assistant) [82] [83] [84]
- Change the throws/travel range to 140% for aileron and elevator before calibrating the flight controller input monitor, this increases the resolution of the stick input to give an even smoother flight (return the values to 100% afterwards for easier flight, see next point) [85]
- To get a smooth ride, lower the dual rate for aileron, elevator, rudder and throttle, e.g. 50%, so that a lot of stick input results in little actual quad movement, use a switch to change between two sets of rates (dual rates, launch and smooth ride) [86]
- Add a small piece of Kapton tape over all the solder points for the TBS Core, Cam and VTx headers and RC control headers to prevent accidental shortcircuits
- To keep a Lipo battery balanced and long lasting, set the voltage alarm to go off when the individual cell voltage settles around nominal 3.7V, for 3S what would be 11.1V and for 4S 14.8V
- When "jello" effect (caused by high frequency vibrations) appears on HD footage, use a set of soft memory foam earplugs between the frame and the GoPro camera [87]
- If horinzontal lines appear on the video stream, it is caused by the motor/rotor vibrations and apply a piece of gel or vibration reduction foam to the video transmitter [88]
- The center of thrust is 15 mm forward of the center of gravity, CoT balances the load equally on each of the four motors [89]
- A TBS Core backup battery can be soldered to the two pads marked VIN2 but in reality is not really need if the main battery is dead the quad will fall to the ground, TBS Core picture
- On the NAZA flight controller, mask the sides with black tape to minimize the loss of height when sunshine bits the barometer [90]
- Using widest GoPro setting, put 1.5cm padding behind the camera to offset the view of the propellers [91]
Flight controller settings
A few links to NAZA and CopterControl stabilization settings suitable for the TBS Discovery. List format: pitch/roll/raw/vertical and pitch/roll
- Trappy's DJI NAZA settings - 150/155/120/100 and 125/125
- Enthlapy's Discovery Beta OpenPilot CC3D settings
- Enthlapy's OpenPilot CC3D settings
- mechnan's DJI NAZA fine tuned settings - 117/101/200/180 and 110/110
- rcschim's DJI NAZA settings - 125/125/125/125 and 110/110
- Trappy's DJI NASA 750KV settings - 134/109/93/198 and 183/143
- MidwestRob's MT2216 900KV DJI ESC settings [92] - 150/135/125/125 and 140/125
Build logs
For details on building and setting up the Discovery, take a look at the pages below for an idea.
- juz' OpenPilot build log
- Enthlapy's OpenPilot build log
- meme's build log
- Rensen's DJI Build Log
- Traveller's Disco build adventure
- kloner's TBS Discovery build log
- olivier30900's NAZA GPS build log
- WiseDuck's NAZA build log
- isotop's NAZA low cost build log
- acuralegendz's NAZA build log
- rcschim's NAZA build log
- RTRyder's TBS and QAV builds
- jcoahran's NAZA EagleTree build
Also follow TBS Discovery quadcopter thread on FPVLab.
Tools
- eCalc - find the optimal propeller+motor combination
- NAZA gains database - get an idea of the gain to aim for
Shops
- teamblack-sheep.com - Home of TBS Zephyr I & II, Discovery and CORE, AU
- rctimer.com - Lots of motors, ESCs and clone Flame wheel, CN
- flying-hobby.com - Good selection of DJI items and great prices, HK
- goodluckbuy.com - DJI items and a lot of other accessories, HK
- uavproducts.com - Source for DJI kits and frames, US
- hobbyking.com - Motors, ESCs, batteries and a lot more, HK
- hobby-wing.com - DJI parts and clones, HK
- globe-flight.de - Multicopter items, FPV equipment, propellers, DE
- servocity.com - Pan and tilt systems
- addictiverc.com - Source of Graupner propellers, US
- elecricwingman.com - Another source of Graupner propellers, good prices, UK
- gothelirc.com - APC, Gaui, Graupner propellers, US
- altigator.com - Graupner props, good prices, BE
Video
This is the official Team BlackSheep video of the final production frame.
Final Setup
Below is a photo gallery of the final build of my Discovery with everything mounted.





























{kind=link}